01 · Vision
◫
Visual quality
Learns normal production appearance and localizes deviations on each part.
- Defect heatmaps
- Inspection ranking
- Surface, PCB, packaging or product
Visual defect detection, machine-risk scoring and process-deviation alerts built from data the plant already produces.
We are developing an AI MVP for industrial predictive quality, anomaly detection, and predictive maintenance.
Instead of reacting only when a machine fails or a defect appears, we analyze historical industrial data to detect process deviations earlier and prioritize what should be reviewed first.
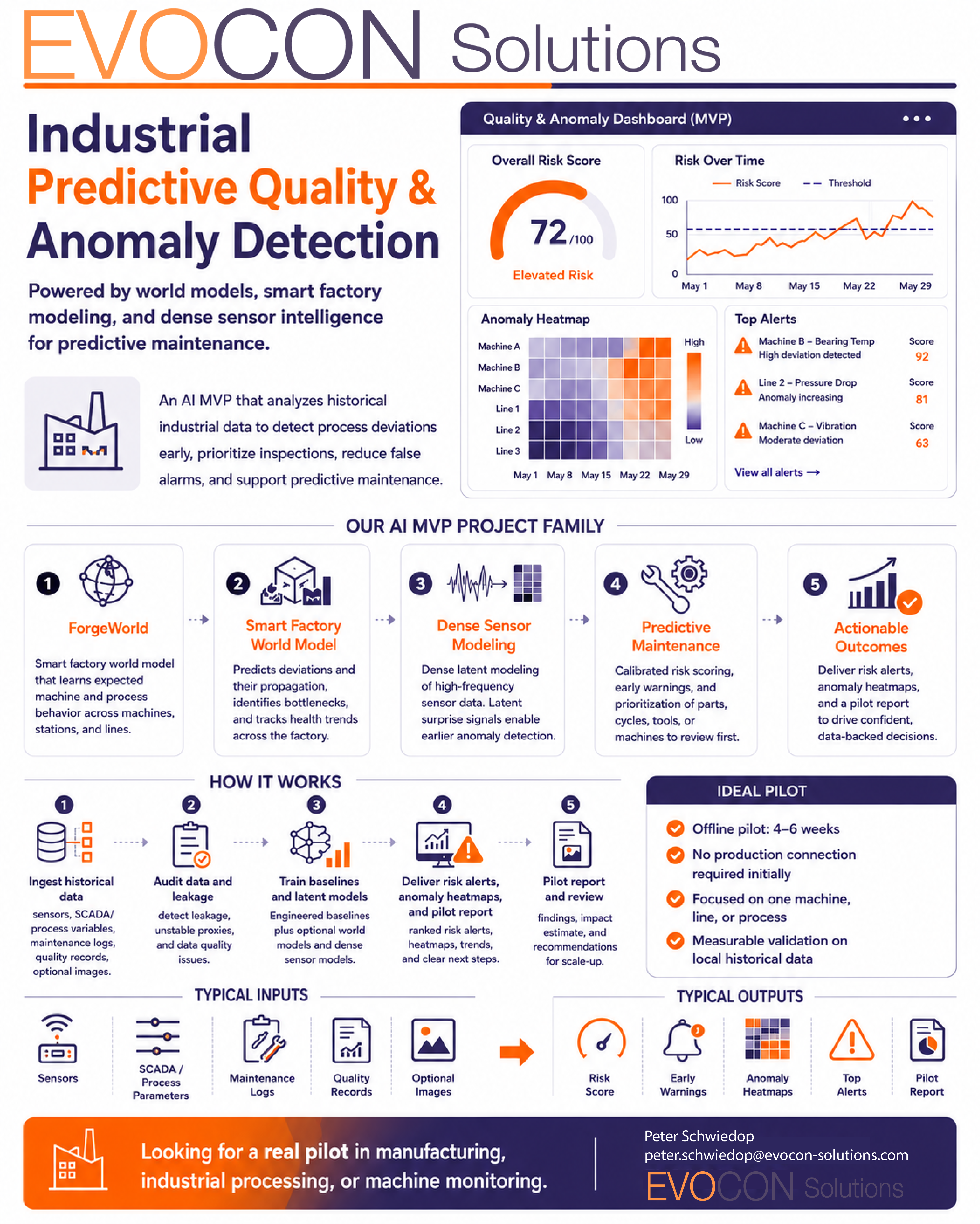
The goal is not to generate more data or more alarms. It is to identify what changed, where it changed and what deserves attention first.
Rich but fragmented information at different spatial and temporal scales.
Impact becomes visible when the intervention window is already small.
What to inspect, which asset to review and when the deviation started.
Learns normal production appearance and localizes deviations on each part.
Combines physical signals, process variables and calibrated models.
Compares expected process evolution with what is actually observed.
The system combines strong industrial baselines with self-supervised representation learning. Complexity is kept only when it adds measurable value.
Rules, physical features and classical models define the standard any advanced model must beat.
Learns structure from large volumes of unlabeled images and process sequences.
Local scores become risk by part, cycle, tool, lot, shift or production line.
DINOv2/ResNet extract local descriptors. PatchCore and PaDiM compare each region with normal history to localize deviations.
Pilot output: ranking, heatmap and comparison against normal references.
The practical standard remains operational context + physical features. The token-level model is retained when it delivers a measurable incremental signal.
For visual representation, anomaly detection and temporal deviation.
Normal images, sensor sequences and production cycles can teach structure and expected evolution.
Defects, scrap and failure events allow recall, lead-time and calibration analysis when available.
Without labels: anomaly and deviation. With historical events: supervised risk and economic validation.
The visual architecture produces a strong public-benchmark signal, and the dense sensor model adds incremental temporal information.
A public result does not guarantee performance on another line. Value is confirmed on the client’s real distribution, defects and operating conditions.
Inventory, quality, traceability, temporal structure and use-case definition.
Rules, classical models and a strong visual foundation to set a realistic reference.
Heatmaps, risk scoring, temporal surprise, calibration and error analysis.
Local demo, final benchmark, expected impact and integration roadmap.
Self-supervision learns normality without labels. Historical events are used when a specific supervised target must be measured or calibrated.
Focus manual review on the parts or cycles with the highest measured risk.
Detect deviation before the defect, stoppage or reactive maintenance event.
Decide whether to integrate, collect more data or stop without relying on black-box promises.
We are looking for manufacturing, industrial processing or machine-monitoring companies interested in testing this approach on a real operational case.
"If this is relevant to your team, I would be happy to discuss a focused pilot."